So, this week was all Alpha Review prep. We made a pretty good video, if we do say so ourselves. Which we do.
But before we made a great video, we also did some work. Thanks to some guidance from Pengfei and Joe, we made some good progress this week.
Omar used MEL for the first time this past week! After reading a few online tutorials and trying to figure out how to use C++ code in Maya, he found that it would just be easier to adapt some of his C++ beta-spline interpolation code into MEL script. So that's what he did. And it worked pretty well. See the image below.
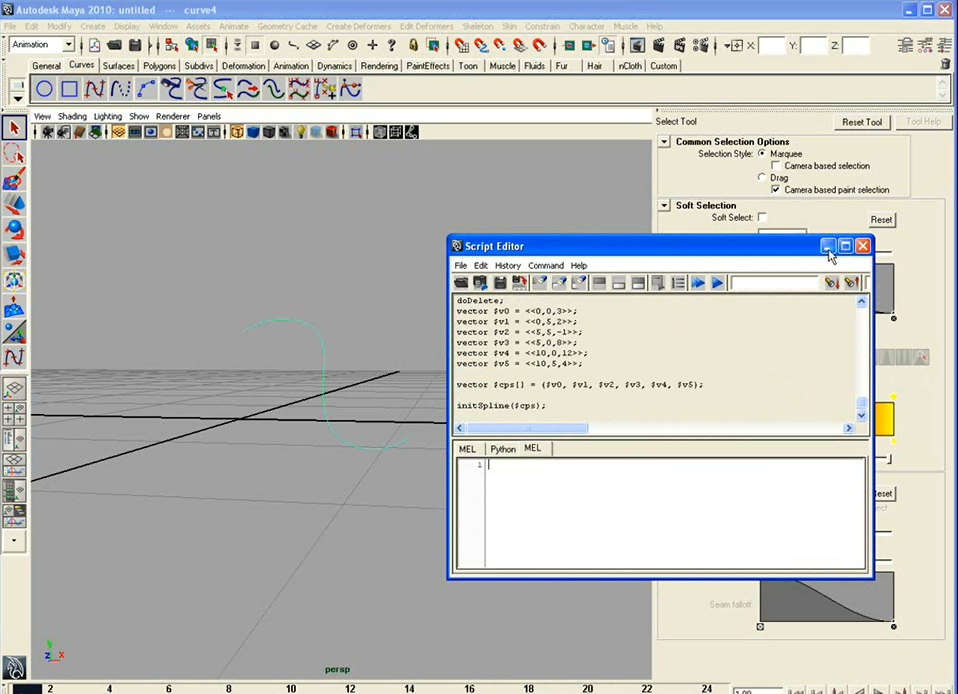
So, the one problem is that this particular curve actually has 60 edit points, when it should really only have 4. That is because Omar has not figured out how to have Maya draw a curve with a custom interpolation scheme like the one he has coded. He can specify points all he want, but it will only allow him to do so with interpolation of degree between 1 and 7. He may just have to get C++ and Maya working together. But for now, in order to at least visualize it in Maya, he currently has the script drawing the curve with 20 points on each segment, where each of these points is interpolated linearly. If anyone knows how to define an interpolation scheme using MEL, let Omar know. Thanks.
Nicole added finger joints to the rig. (A few of the hand joints had their names changed, and joints rhand_end and lhand_end were deleted because they were no longer needed.) Yay, fingers!

The plan was: add finger joints to the rig, save current skin weights, unbind the skeleton and the model, rebind the skeleton to the model (so you can animate the fingers), load the old skin weights (so you only have to paint the finger weights), and finally modify the skin weights so the finger joints move the fingers.
However, Nicole ran into a problem. Nicole unbound the joints; the model's arms and legs, previously in the bind pose, changed position to this:

The rig does control the model, but it causes awkward scaling when a joint is moved since the skeleton and the model don't line up properly. Nicole has tried both smooth bind and rigid bind. Neither solves the problem.
Pengfei: Nicole has uploaded the Maya file to the sig computers if you'd like to take a look at it.
The file is called A_001_v8. It’s in sig-share\Projects\2011-RCTA-MARKETPLACE, and it has the model before the skeleton has been un-bound. (If you detach the skin and then bind it again, you get the image above.)
Question: Also, Nicole would like to know what to do about the skel_driven skeleton (the one she is not animating with)? Does she need to add finger joints to that one as well and link it to the main skeleton? She didn't play around with that, since trying to re-rig two skeletons could create twice as many problems, especially when one is linked to the other. (And she's not even sure if we'll need to use that skeleton.)
For next week:
- Omar will hopefully be able to solve his interpolation problem in Maya. He'll try to make interactive manipulation of the curves work in maya like he has in his 2D GUI, but he's not sure ho far he'll get on that this week. There's a lot of things to do before spring break.
- Nicole will hopefully be able to solve the problem with binding the rig, and will be able to work on the animations that involve fingers.
- Nicole will also start reading up on MEL and Maya plugins. The next step is to draw out the curves in Maya for one joint (specifically, the translation of the joint over time), which sounds like a job for MEL. Once Nicole gets this done, she can give the control points of the curve to Omar, who can modify them with his curve editor. Drawing one curve is just a test. Eventually, we want to have a curve for every joint.
Tender-Lovingly yours,
Nelskati




